")
A Transbot é um robô de projeto programável de alto nível baseado no Raspberry Pi 4b para adultos e graduados Recomendamos usar o PI 4
B 8
GB. A poderosa função de mapeamento requer memória interna de execução suficiente. O uso do Raspberry Pi 4
B 4
GB é geralmente ele só pode realizar a função de construir um único. Observe que o Raspberry Pi 4b não está incluído e precisa ser encomendado separadamente. O ROS, um sistema operacional de código aberto para robôs, é a principal estrutura de desenvolvimento de robôs, fornecendo soluções completas de motoristas a algoritmos e ferramentas de desenvolvimento, facilitando o desenvolvimento do robô. Por exemplo : mecanismos de comunicação, ferramentas de desenvolvimento e ecossistemas podem ser implementados por meio da ERO. A Transbot é um robô programável e inteligentemente desenvolvido com base neste sistema. A percepção de navegação de mapeamento de Li
DAR, navegação tridimensional de mapeamento e planejamento de caminhos é a maior característica do carro do Transbot Robot Arm. Além disso, todas as funções básicas de reconhecimento inteligente estão disponíveis, bem como a patrulha tradicional de linha e a prevenção de obstáculos, etc. Integre as funções do tanque G1, Jet
Bot e DOFBOT. Campo de robô de programação de aprendizado profundo. O Yahboom oferece cursos de materiais profissionais, incluindo explicações em vídeo, que combinam teoria com operações práticas para ajudar todos os fabricantes a aprender rapidamente e dominar o conhecimento do ROS. Equipe profissional de suporte pós-venda para ajudá-lo a responder suas perguntas a qualquer momento. O Transbot possui 5 versões, a câmera HD da versão 1, versão 2 HD + braço robótico, versão 3 de profundidade, versão 4 de profundidade + braço robótico, versão 5 de profundidade Câmera + braço robótico + tela de 7 polegadas; Escolha de acordo com suas próprias necessidades correspondentes.
Unidades testadas Em ótima condição de trabalho Verifique seu modelo se é o mesmo que a listagem antes de comprar Não aceitamos responsabilidade se você comprar produtos errados...
Dispositivos de roteamento / comutação HP MSR 4PORT GIGT HMIM Módulo HP MSR Módulo HMIM GIGT HMIMPara redes de dados4 x 10 / 10 / 1000baset LANpar torcido1 Gbps Gigabit Ethernet MSR 4p G
Lock de mola embutido para liberação rápida Dobra como sombra do sol para evitar o brilho e impede o superaquecimento do seu dispositivo A montagem antifricção funciona sem exigir uma a
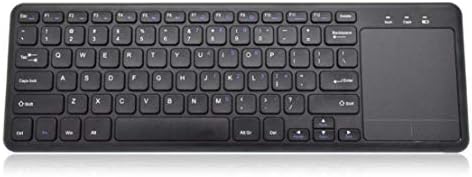
? [Compacto] teclado de onda de caixa compatível com a Lenovo Legion 5i Pro (16 in 82 JF) Com apenas 1,8 cm, o teclado Mediane é super fino e leve! Arregue com segurança o teclado facilm
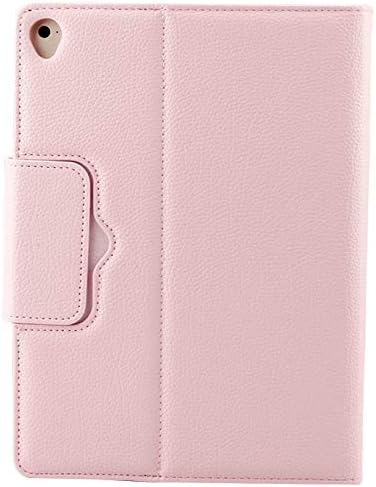
Compatível perfeito com os seguintes modelos : 2018 i Pad 6 (A1893A1954), 2017 i Pad 5 (A1822A1823), i Pad Pro 97 (A1675A1674A1673), i Pad Air 2 (A1566A1567) e AIR IPAD (A147 A1475)...
Suporta o soquete AMD AM4 RYZE 2000, 3000, 4000 GSérie, 5000 e 5000 Processadores de desktop da série G Intel WiFi 6 802.11ax (2,4 Gbps) + Bt 5 Intel Gigabit LAN Suporta DDR4 4533+ (OC).1
Feito de liga de zinco, eles têm aparência mais elegante, resistência à corrosão e boa resistência ao desgaste Organiza se efetivamente, organiza efetivamente os fios e cabos de equipa
Dimensões da bolsa de armazenamento eletrônicas : 9,44*5,9*314 polegadas (24*15*8 cm) e também é muito adequado para uso familiar e organização diária...
【Recursos】 : Design especial e materiais de alta qualidade garantem que o adaptador seja mantido em baixa temperatura para carregar com segurança e certificado pela FCC CE ROHS, focamos
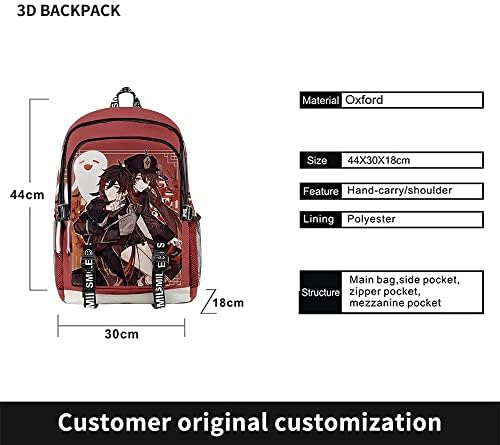
Mochila Oxford à prova d'água de alta qualidade, adequada para todos os tipos de pessoas, especialmente crianças Ele pode ser usado como uma bolsa escolar na escola, você também pode us
Este item é o cabo que usa para conectar o seu rádio e PC e, em seguida, escreva a configuração do programa e a frequência do rádio por PC Super estável e programe com eficiência ser
A peça de substituição recomendada por GM para o componente original de fábrica do seu veículo GM Oferecendo a qualidade, confiabilidade e durabilidade do GM OE Fabricado para GM OE Esp
Sobre o tamanho Confirme se o tamanho da mochila atende às suas necessidades antes de comprar Você pode perguntar ao atendimento ao cliente se tiver alguma dúvida Material premium feito
2,2 polegadas x 2,2 polegadas x 20 pcs Vinil 100% durável Você receberia os padrões que você vê nas fotos Todas as nossas obras de arte são impressas com resistente a arranhões certif
USB OTG / OntheGo ✅ : Conecte e use compatível com o seu Sony Xperia 5 Plcom periféricos de computador, como unidade flash, teclado, hub, mouse e muito mais, torna compatível com Sesedi
Economia de espaço : o suporte de parede de TV fixo apenas segura a TV na parede para economizar espaço, você pode remover facilmente e rapidamente a TV dos suportes da parede da TV Ajust
Pacote de 4 adesivos! Colar ou compartilhar Impresso com tintas à prova d'água resistentes à resistência ao ultra violet (UV) qualidade de impressão de alta resolução Os adesivos sã
Para o Apple i Pad Mini, mais o Mini 2 e 3 Stand se ajusta a qualquer ângulo de visualização Ímãs e dobradiça seguram firmemente Resiste a arranhões e pequenos derramamentos...
plástico Feito nos EUA ou importado Material : A mini unidade flash é feita de material plástico, à prova d'água, à prova de poeira e à prova de choques, contendo chip à prova d'águ
Pacote de contorno pequeno e encolhido Memória flash IC (Lote de 3 peças) Novo, nunca usou peças Embalado em embalagens seguras de ESD Qualidade inspecionada por profissionais do setor...
Para transmissão USB30 de alto desempenho, a maioria dos sistemas pode ser usada sem instalar um driver Permite adquirir sinais de áudio E esse cartão tem direito com alto desempenho...
32 GB Micros DHC Classe 10 Compatiante Erro interno Código de correção (ECC) para detectar e corrigir erros de transferência Suporta modos de automóvel, desligamento e sono Considera os
O Screen Pad 20 adiciona uma tela sensível ao toque interativa, secundária de 5,65 ”, para aumentar a produtividade.0 se encaixa em uma série de aplicativos utilitários de asúteis : c
Tensão de entrada mundial 100240 VAC 50 / 60 Hz OVP, OCP, Protecção de SCP (OVP : Proteção de saída de tensão Unidades testadas Em ótima condição de trabalho...
Filme protetor de tela fosco ultrafina, projetado especificamente para o Acer Nitro KG2 27 kg272 sbmiipx O revestimento antienseada melhora a visibilidade da tela na luz ambiente, reduzindo
EDIMAXEW7438 RPNEDIMAX REDE EW7438 RPN sem fio N 300m WiFi Ex EDIMAXEW7438 RPNEDIMAX REDE EW7438 RPN sem fio N 300m WiFi Ex EDIMAXEW7438 RPNEDIMAX REDE EW7438 RPN sem fio N 300m WiFi Ex.
Um UPS versátil desenvolvido para as condições de poder mais severas do mundo Um UPS versátil desenvolvido para as condições de poder mais duras do mundo...
Interface de transmissão USB20, a taxa de transferência de dados de até 480 Mbps, compatível com o USB1 A concha de liga de alumínio protege efetivamente o disco rígido interno do choq
O alto falante do laptop é fácil de usar, basta conectar diretamente ao PC via conexão USB, ele possui um interruptor simples e desligado para a luz, ele acende com um brilho suave, pode
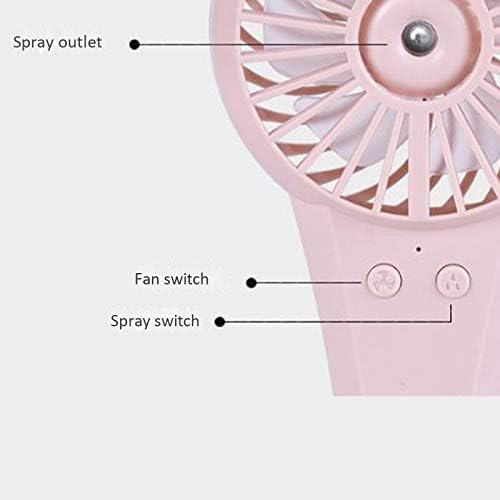
Fãs, eletrodomésticos, fãs baratos, eletrodomésticos de alta qualidade, fãs , Queimadores de incenso e incenso, casa e jardim, incenso barato e queimadores de incenso, casa e jardim de
【100% de tiro real, você obtém o que vê】 100pcs Stranger Things Stickers Pack Em vez de usar a imagem original vibrante que usou para imprimir por fábrica como imagens de nossos pro
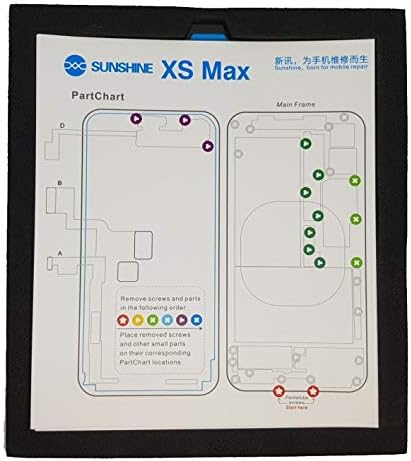
Use este tapete magnético com inserções de papel para ajudá lo ao desmontar vários modelos de i Phone Use este tapete magnético com inserções de papel para ajudá lo ao desmontar vá
Repelente de água e prova de umidade feita de tecido de algodão impermeável, que obstrui a água e o vapor de maneira eficaz Não se preocupe em molhar seu laptop e acessórios a partir
Windows Incorporado padrão 7 E 32 AMD RADEON Integrado HD 8280 E 4 GB 1600 MHz DDR3 L SDRAM 16 GB mlc msata ssd Obtenha uma experiência de desktop poderosa e perfeita, recursos aprimorados
15 polegadas TFT LED Painel de toque de grau industrial PC, Proteção do painel frontal IP65, tela de toque resistiva de 5 fios de alta temperatura, resolução típica de 1024 x 768, alime
1680 x 1050 RESOLUÇÕES NATIVAS Detalhes impressionantes e imóveis mais visíveis sem comprometer o espaço da mesa 5 Milissegundo (GreytoGrey) Tempo de resposta (típico) ajuda a reduzir




















![Celicious Matte Anti-Glare Protector Film Compatível com Acer Nitro KG2 27 kg272 SBMIIPX [pacote de 2]](/timson/aliy/196538-celicious-matte-anti-glare-protector-film-compativel-com-acer-nitro-kg2-27-kg272-sbmiipx-pacote-de-2.jpg)